A two-Arduino, closed-loop ice dispenser that delivers a user-specified
mass of ice into a cup using real-time weight feedback. Custom 3D-printed
hopper and auger, 5 kg load cell, and Simulink-generated SR-latch motor control.
The brief: deliver an exact mass of ice, every time.
Build, and validate an automated ice-dispensing machine capable of delivering a user-specified
mass of ice into a cup using real-time weight feedback. The system must be repeatable, easy to
maintain, and safe to operate around melting ice.
Performance requirements
Target mass: 100 g of ice
Accuracy: ±5 g (design goal)
Overshoot: ≤ 10 g, dependent on stopping latency
Dispense 100-120 g of crushed ice under normal conditions
Mechanical & environmental
Hopper and auger 3D-printed, jam resistant for irregular cubes
Cup sits securely on the load cell with no lateral movement
Tolerates meltwater; electronics elevated and isolated
Auger and hopper removable for cleaning
// 02 — System Architecture
Two Arduinos, one tight feedback loop.
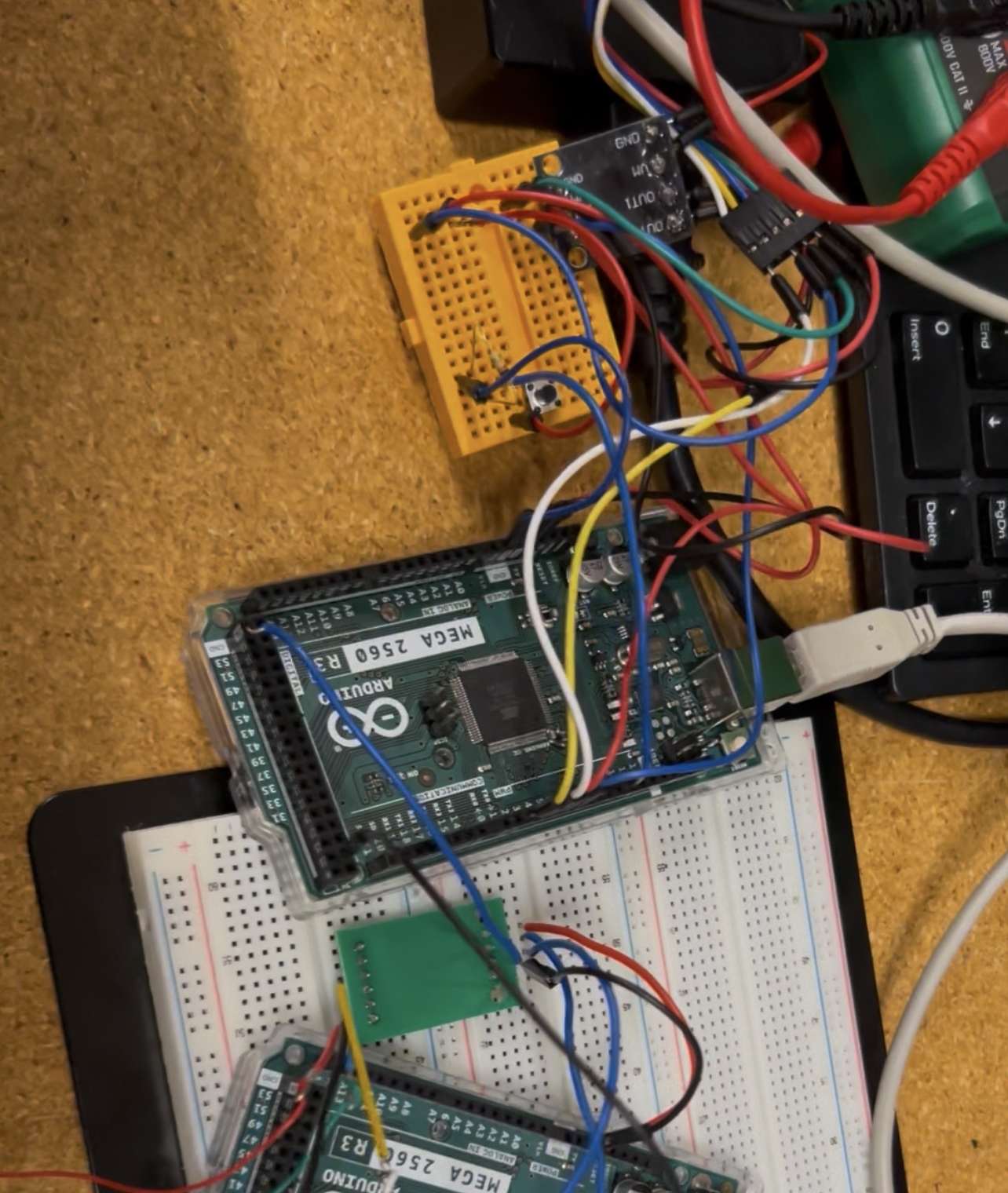
Sensing and actuation are split across two Arduino Mega 2560 boards. Cleanly
separating the scale and motor responsibilities meant the SR-latch logic in
Simulink stayed simple and the load-cell sketch could focus on filtering and tare.
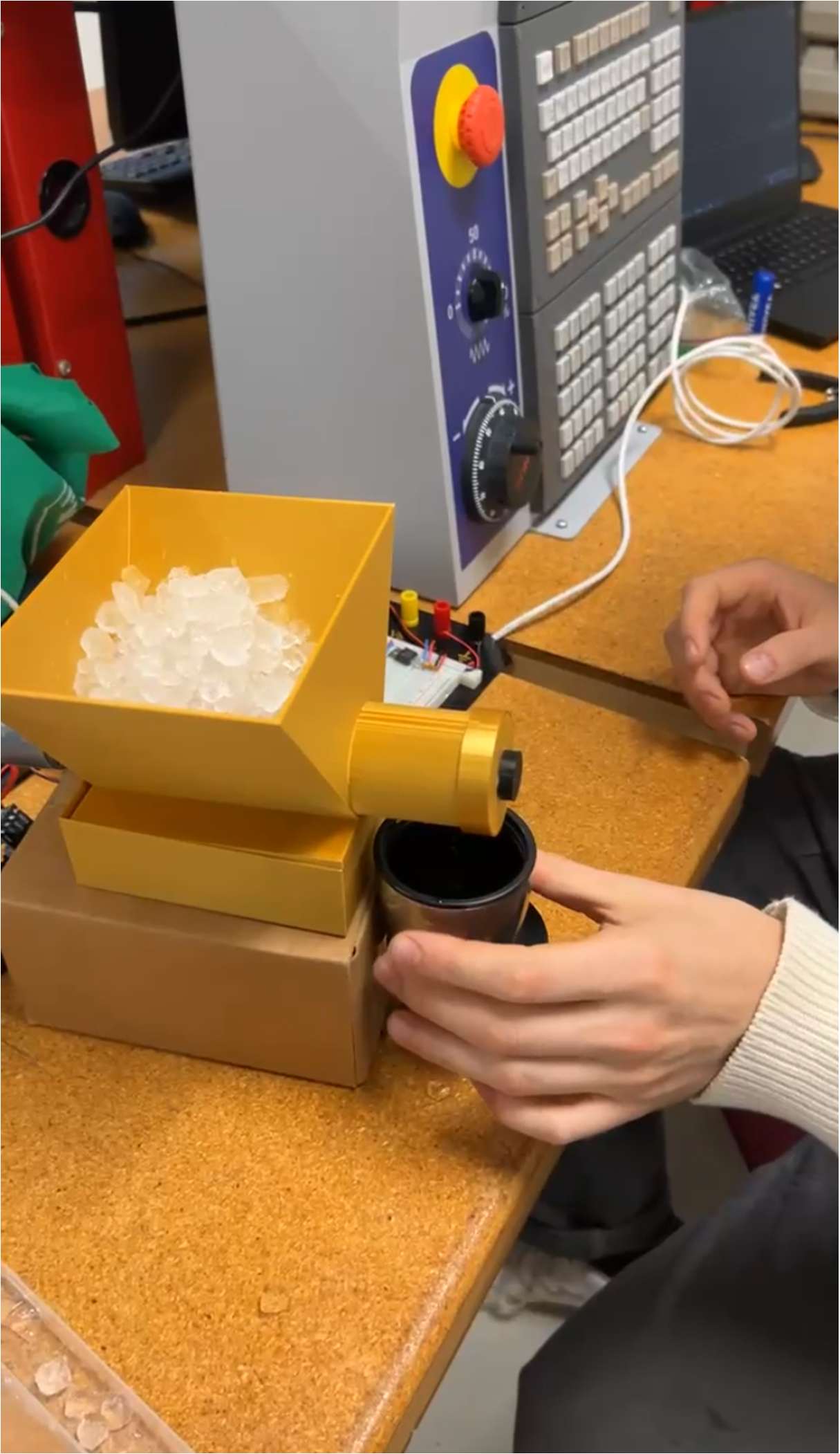
User starts a dispense
Cup placed on the platform, button pressed on Pin 10 of the Motor Arduino — Latch S input goes HIGH.
SR latch sets, motor turns on
Q output enables a fixed PWM duty cycle (~50%) on Pin 5, driving the H-bridge that powers the FIT0186 gearmotor. The auger begins rotating ice into the cup.
Scale Arduino samples mass
HX711 reads the 5 kg load cell at 10-20 Hz with digital averaging. Tare is captured at startup; sustained readings are compared to the 100 g target.
Threshold reached → reset
When the cup mass crosses 100 g, the Scale Arduino drives Pin 22 HIGH. The Motor Arduino sees the 5 V signal as the latch's Reset, Q drops to 0, PWM goes to zero, and the motor stops without overshoot.
System idles for the next press
If the cup is already at or above 100 g, the latch stays reset and a button press cannot restart the motor — a built-in safety against overfilling.
// 03 — Build
CAD, 3D-printed mechanics, and a wired-up bench.
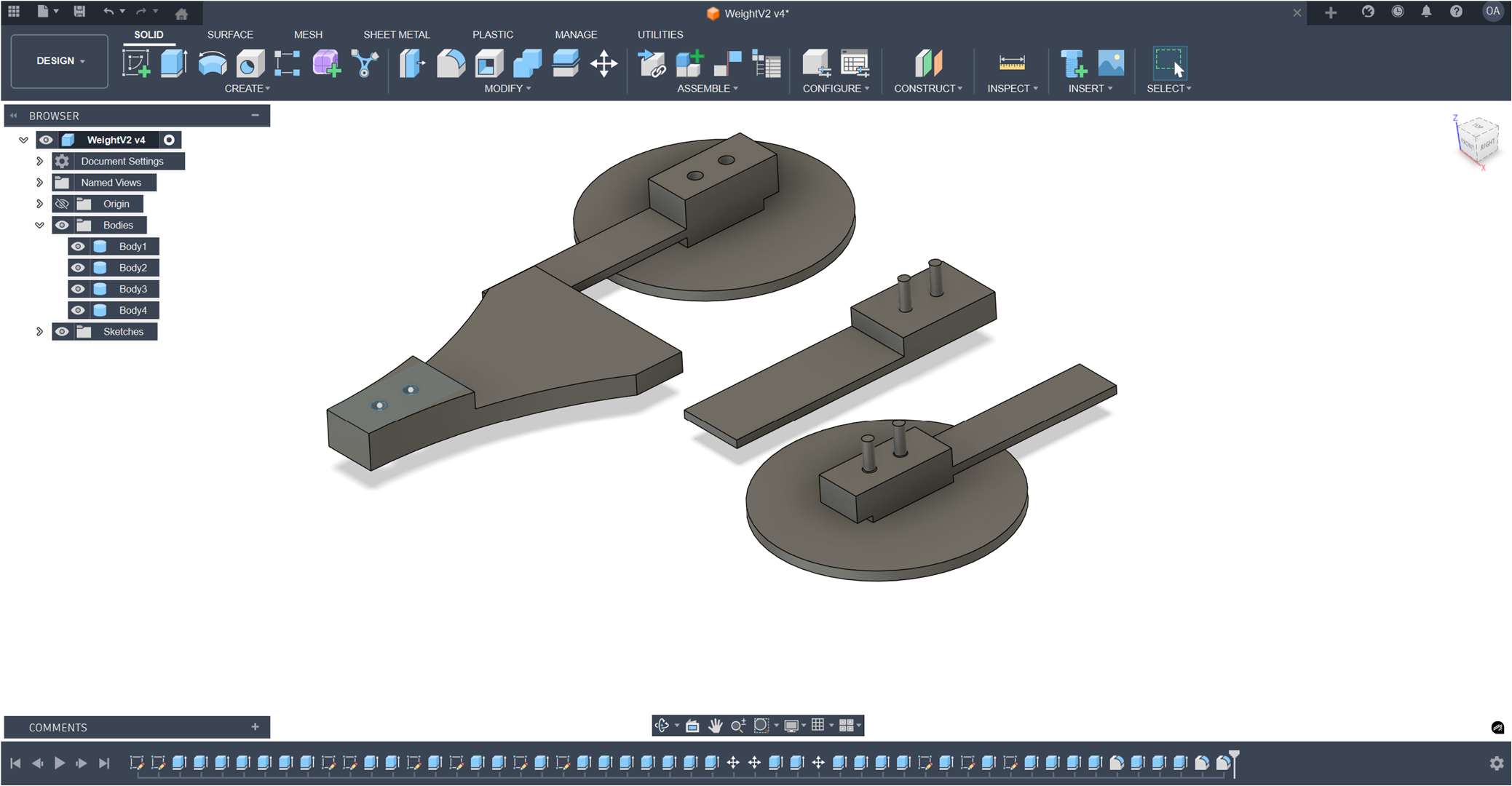
All mechanical components — hopper, auger, motor housing, drainage tray —
were modeled in SolidWorks and Fusion 360, then 3D-printed in PLA. Two
Arduino Mega 2560s, an HX711 amplifier, and an H-bridge motor driver formed
the electronics stack on a perfboard breadboard.
CAD & mechanical
Sloped 3D-printed hopper with melt-runoff perforations
Two-turn helical auger sized to barrel ID for jam resistance
Sealed motor housing with quick-detach for maintenance
Slide-out water reservoir under the dispensing zone
Replaceable chute geometry tuned to avoid bridging
Electronics & firmware
Scale Arduino: HX711_ADC library (Olav Kallhovd), digital output on Pin 10 at 100 g
Motor Arduino: Simulink-generated code on Mega 2560
SR latch + PWM block on Pin 5, ~980 Hz fast PWM
H-bridge driver capable of >7 A peaks for the 12 V auger motor
Optional cup-presence and hopper-door safety inputs
SolidWorksFusion 360Arduino Mega 2560SimulinkHX711FIT0186 gearmotorPLA 3D printingSR latch logicPWM control
// 04 — Gallery
Build photos & CAD captures.
// Live operation
// Top view · auger feed
// Dual Arduino + HX711
// Fusion 360 · platform exploded
// 05 — Outcome
Repeatable cutoff, minimal overshoot.
The completed system met every functional and performance goal. Filtered HX711 readings
produced a clean 5 V stop signal at 100 g; the SR-latch and PWM driver shut the FIT0186
gearmotor off with minimal overshoot. The 3D-printed hopper and auger geometry held
up across repeated trials with crushed ice — minor tolerance tweaks resolved the early
jamming during testing, and the drainage tray kept water away from the electronics throughout testing.
What worked
Separating sensing and actuation across two Arduinos kept each program simple
SR latch eliminated bounce, flicker, and re-trigger noise
Helical auger metered ice consistently after a small clearance bump
What I'd change
Add adaptive PWM (slow-down phase) for sub-2 g final accuracy
Switch to a stepper for deterministic auger position control
Move from breadboard to a small custom PCB for production polish