Back to engineering projects
Single-Brownie
// PRJ_003 · Control Systems
Single-Brownie
Convection Oven.
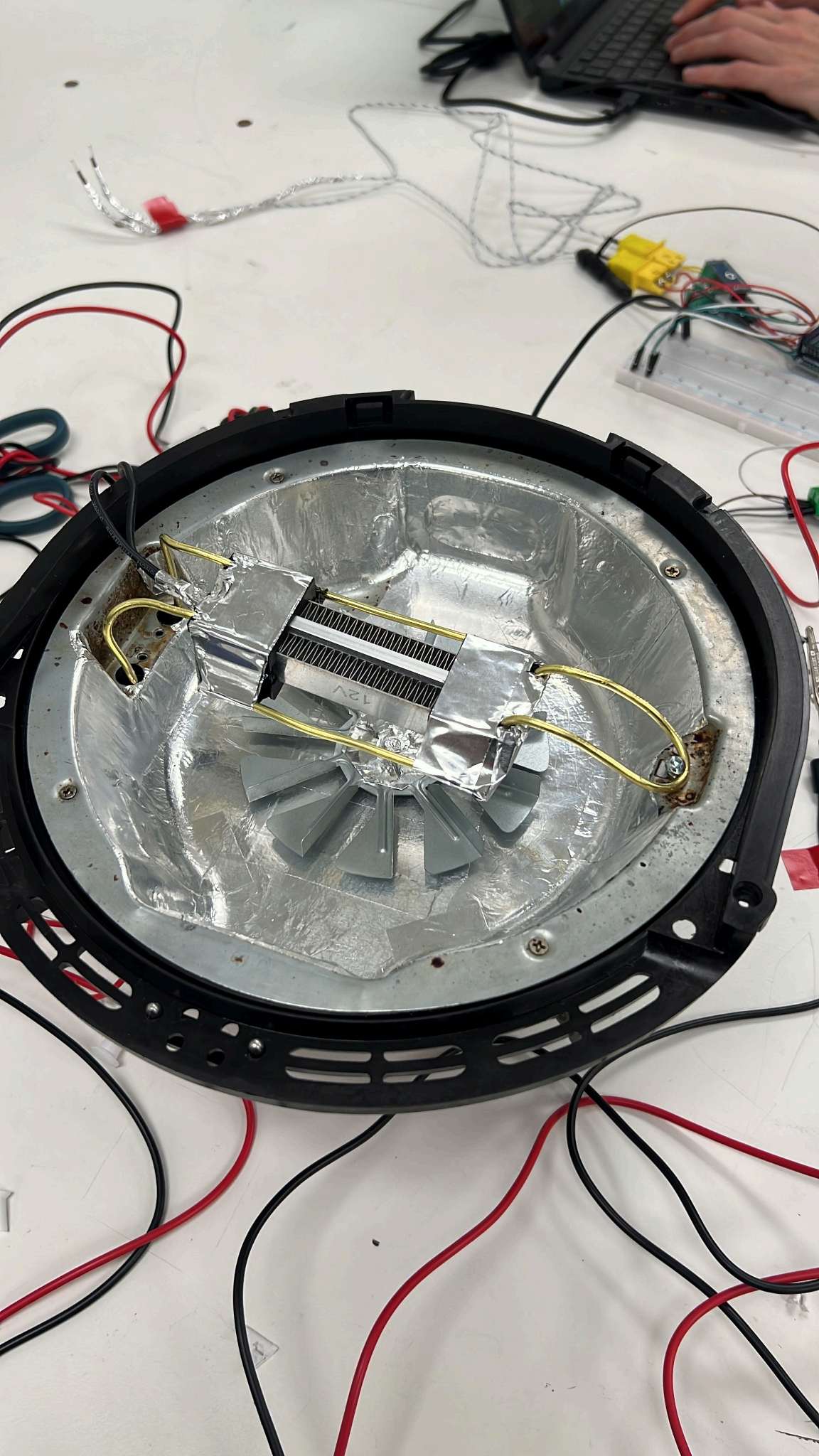
A consumer air-fryer modified into a closed-loop, PID-controlled convection oven for single-portion baking. Twin K-type thermocouples, a MAX6675 SPI interface, a 100 W heater, and an Arduino-tuned PID loop deliver steady, even temperatures inside a custom 3D-printed chamber.
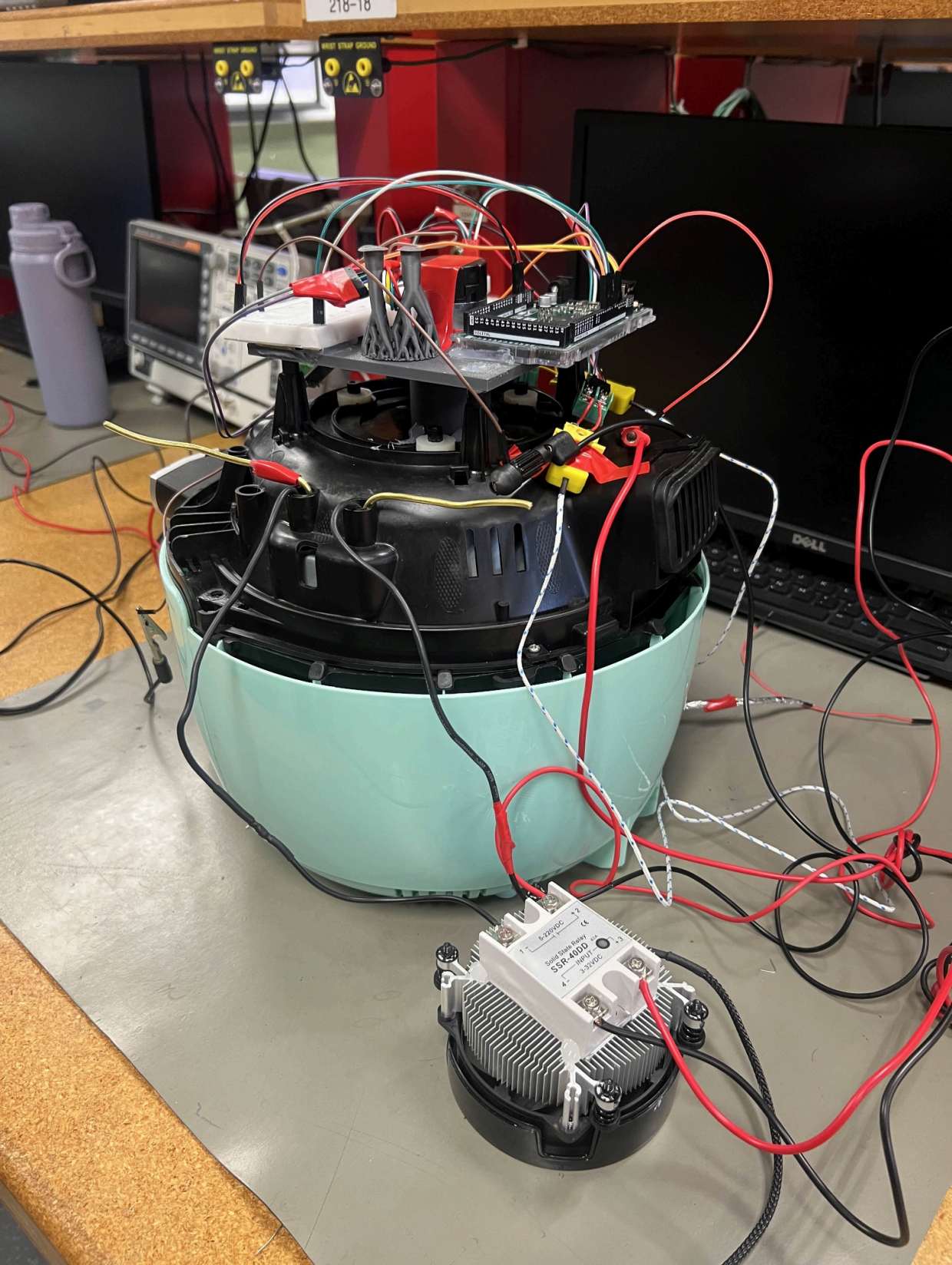
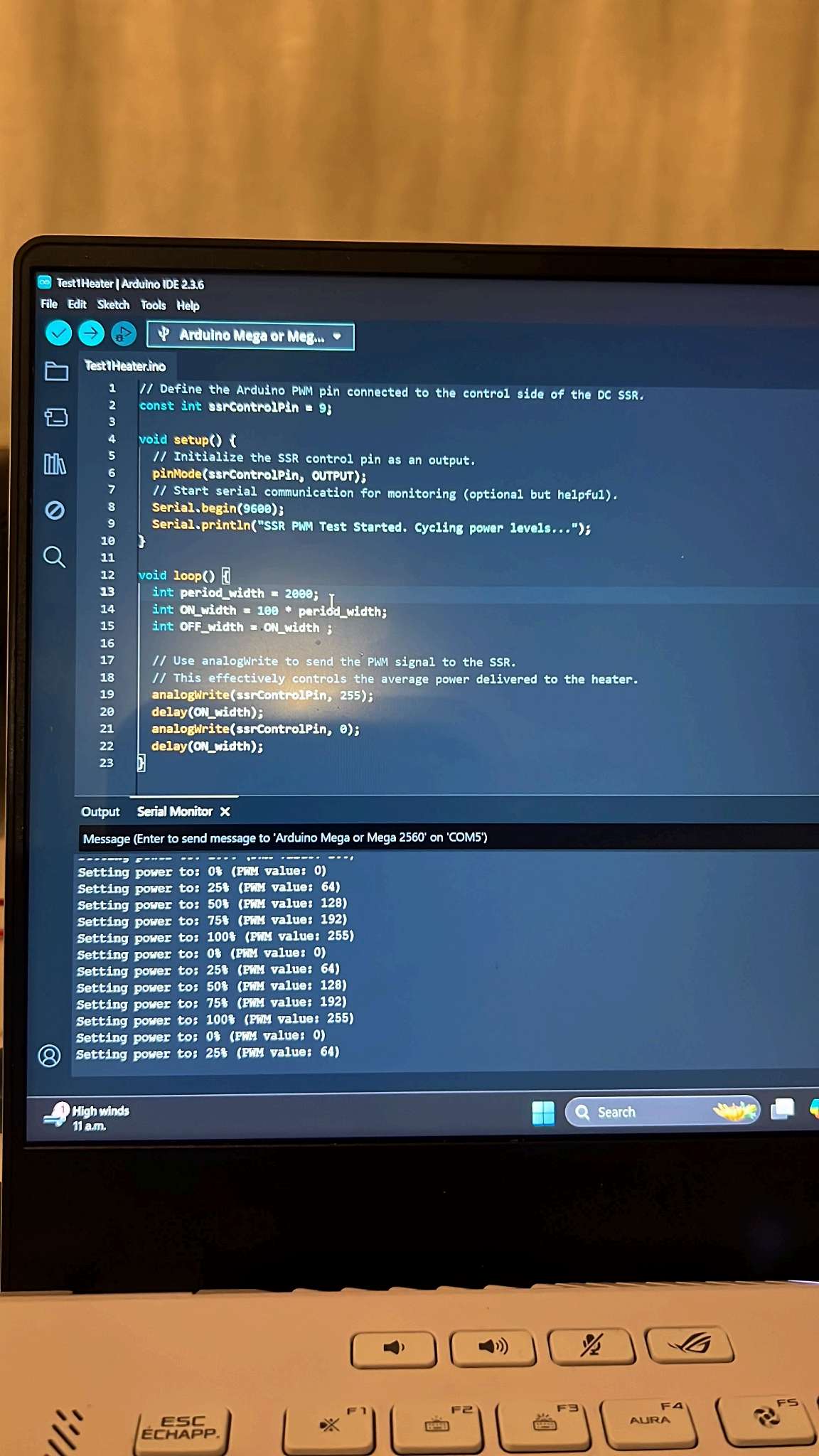
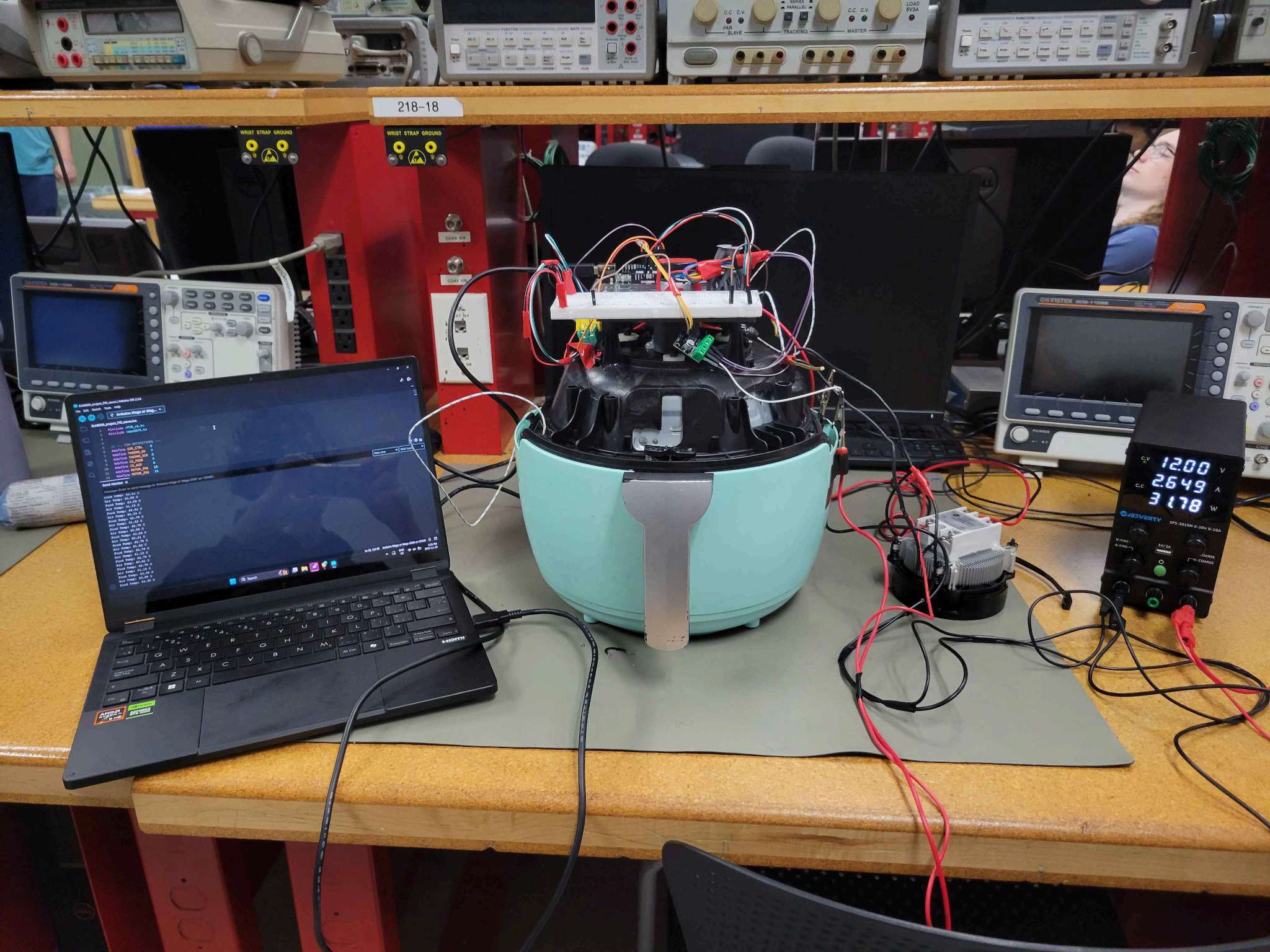
// Bench setup · live PID tuning